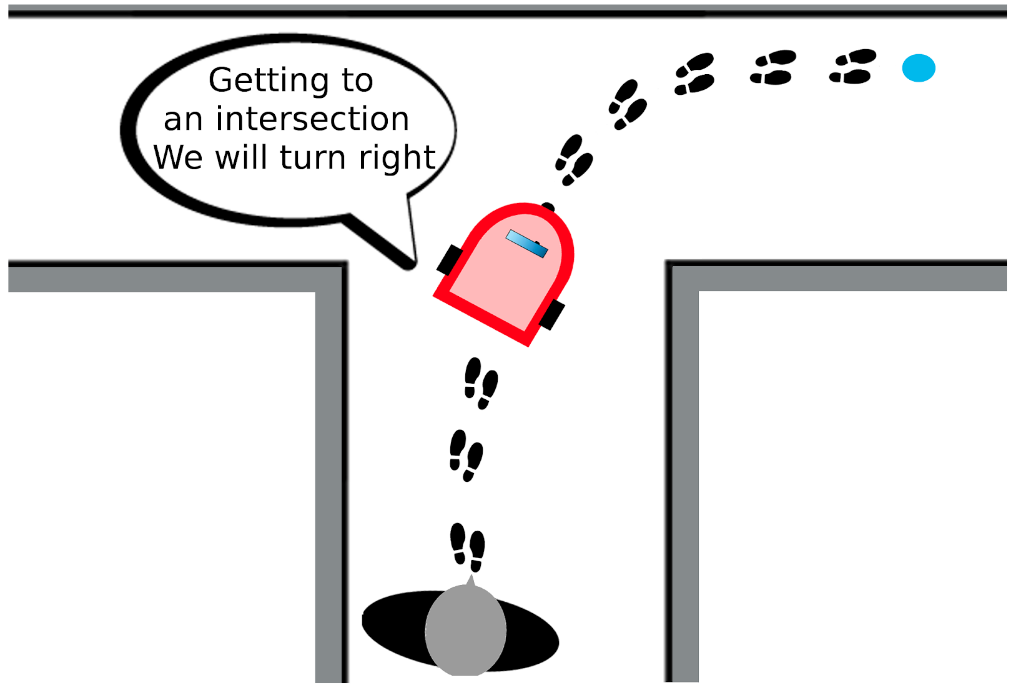
We propose LBGP, a follow ahead method that uses both reinforcement learning and point based navigation. We address the limitations of classical methods and end-to-end approaches by combining Deep RL and classical motion planner
Designed a relational graph learning approach for robotic crowd navigation using model-based deep reinforcement learning that plans actions by looking into the future. Tools: Pytorch, ROS, Stage, Python, OpenCV
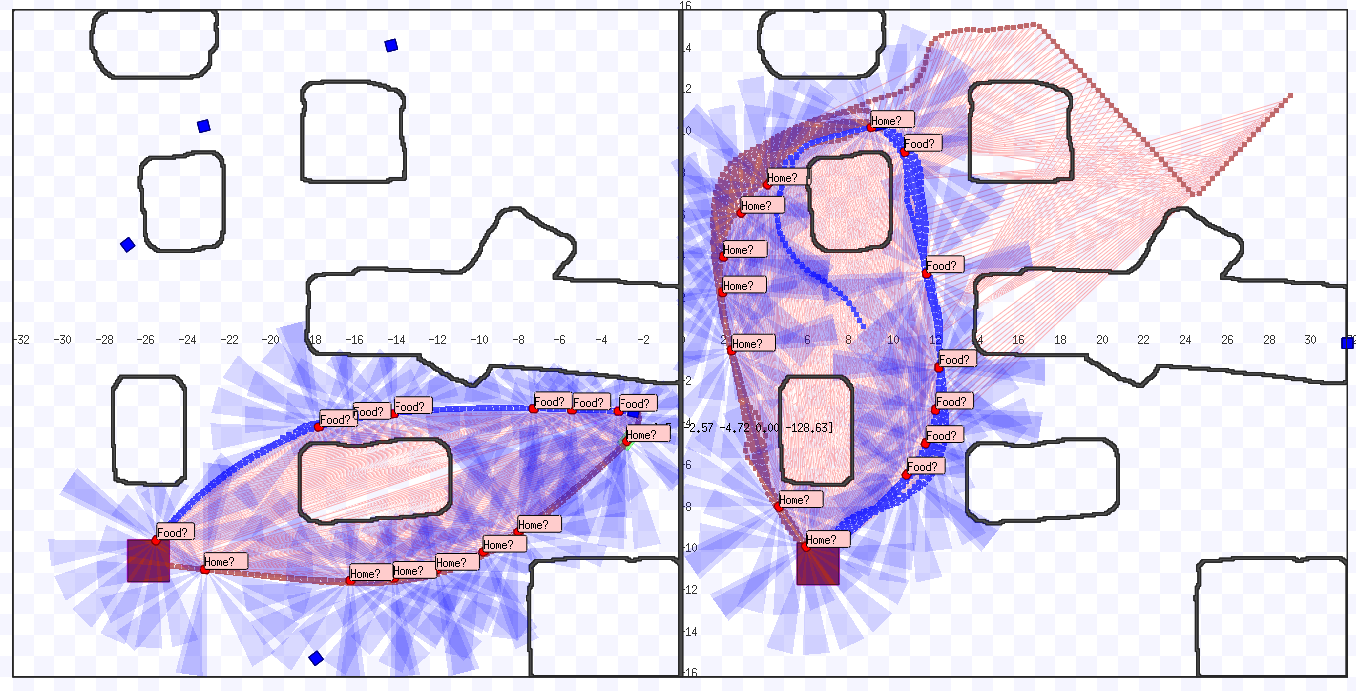
Built an occupancy grid map during online and at the same time use a neural network (Based on ResNet34 and YOLOv2) to detect, locate and say the target classes around the robot. Tools: Pytorch, ROS, Stage, Python, OpenCV
Presented a human model for an autonomous mobile robot that follows a walking user while staying ahead of them. Used multi-modal person detection and a human-motion model that considers obstacles to predict the future path of the user.